Ավտոմատ կոորդինատային արկղերի փաթեթավորման գիծ





Ավտոմատ կոորդինատային դեպքփաթեթավորման գիծ,
փաթեթավորման գիծ,
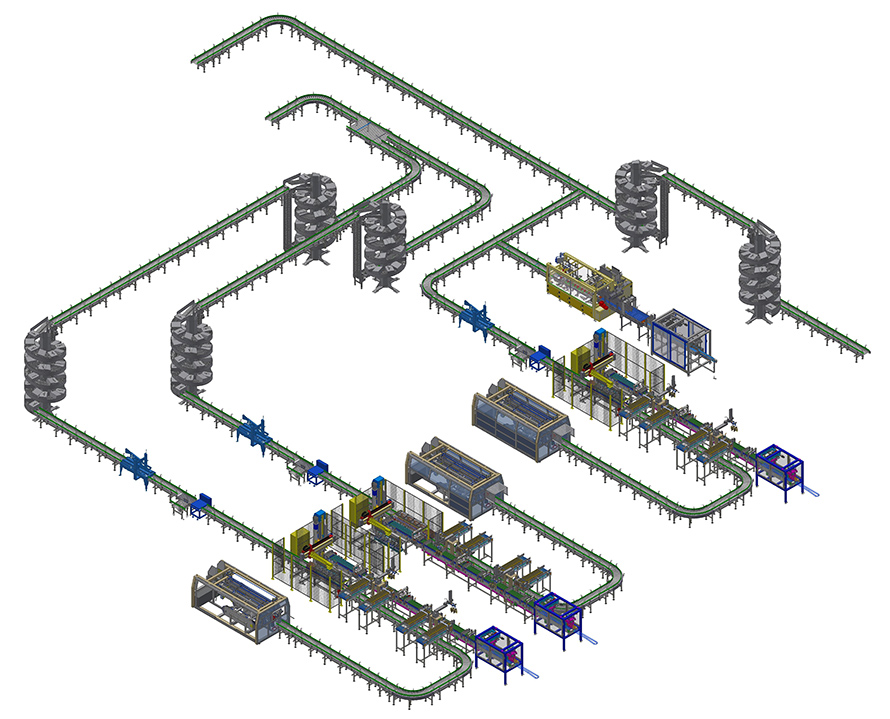
Փաթեթավորման արտադրական գիծը բաղկացած է բարձր արագության բաժանիչից, արտադրանքի փոխադրման գծից, բռնող փոխադրման գծից, Hbot-ից, կրկնակի լիսեռով շարժման մեխանիզմից, արկղերի փոխադրման գծից, հայտնաբերման մեխանիզմից, ստվարաթղթե բաժանման բռնիչից, ստվարաթղթե բաժանման սնուցման համակարգից, սերվո կոորդինատից, շշերի բռնիչից և պաշտպանիչ ցանկապատից: Բարձր արագության բաժանիչը արտադրանքը բաժանում է բազմաշերտ գոտիների, մինչդեռ կրկնակի լիսեռով շարժման մեխանիզմը արագացնում է արտադրանքի անցումը: Երբ արտադրանքը հասնում է ստվարաթղթե բաժանման կայան, Scar ռոբոտը ստվարաթղթե բաժանումը բեռնում է դասավորված արտադրանքի մեջ: Արտադրանքը հասնում է տեսակավորման փոխակրիչ: Այնուհետև արտադրանքը հավաքվում է բռնիչի միջոցով և տեղադրվում ստվարաթղթե տուփի մեջ, և արկղերի փոխակրիչը տեղափոխում է արտադրանքը պարունակող տուփը դուրս:
Փաթեթավորման համակարգի ամբողջական դասավորությունը
Հիմնական կարգավորում
| Ռոբոտի ձեռքը | ABB/KUKA/Fanuc |
| Շարժիչ | SEW/Nord/ABB |
| Սերվոշարժիչ | Siemens/Panasonic |
| ՎՖԴ | Դանֆոս |
| Ֆոտոէլեկտրական սենսոր | Հիվանդ |
| Սենսորային էկրան | Սիմենս |
| Ցածր լարման սարքավորումներ | Շնայդեր |
| Տերմինալ | Ֆինիքս |
| Պնևմատիկ | ՖԵՍՏՈ/SMC |
| Ծծող սկավառակ | ՊԻԱԲ |
| Կրող | KF/NSK |
| Վակուումային պոմպ | ՊԻԱԲ |
| ԲԲԸ | Սիմենս / Շնայդեր |
| HMI | Սիմենս / Շնայդեր |
| Շղթայական թիթեղ/շղթա | Ինտրալոքս/Ռեքսնորդ/Ռեջինա |
Հիմնական կառուցվածքի նկարագրությունը




Ավելի շատ տեսահաղորդումներ
- Սերվոկոորդինատների փաթեթավորիչ ապակե շշերի համար՝ ստվարաթղթե միջնորմով
Ինչպե՞ս է շահագործվում փաթեթավորման մեքենան։ Արտադրանքն անցնում է մի շարք ավտոմատացված գործընթացների միջով։
և կանոնավոր քայլեր, այդ թվում՝ փոխադրման արտադրական գծում տեսակավորում, տեսակավորման համար շրջանառություն, արագացված բուֆեր, փաթեթավորման մեքենա, ավտոմատ կնքման մեխանիզմ և վերջապես՝ փոխադրման գծում արտադրանքի դուրսբերում։










