Ռոբոտ-պալետային բեռնաթափիչ
Ապրանքի մանրամասները
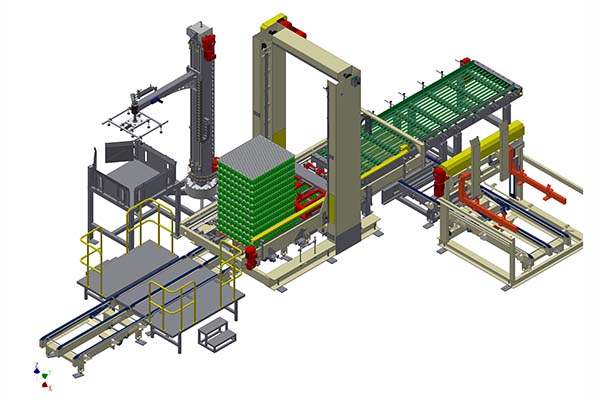
Արտադրության ընթացքում արտադրանքի ամբողջ կույտը շղթայական փոխակրիչով տեղափոխվում է բեռնաթափման կայան, որտեղ բարձրացնող մեխանիզմը ամբողջ պալետը կբարձրացնի բեռնաթափման բարձրության, այնուհետև միջշերտային թերթերի ներծծող սարքը կվերցնի թերթը և կտեղադրի այն թերթերի պահեստում, որից հետո փոխանցող սեղմակը կտեղափոխի արտադրանքի ամբողջ շերտը փոխակրիչի վրա, կրկնելով վերը նշված գործողությունները մինչև պալետի ամբողջ բեռնաթափումն ավարտվի, և դատարկ պալետները կուղարկվեն պալետների հավաքիչ։
Դիմում
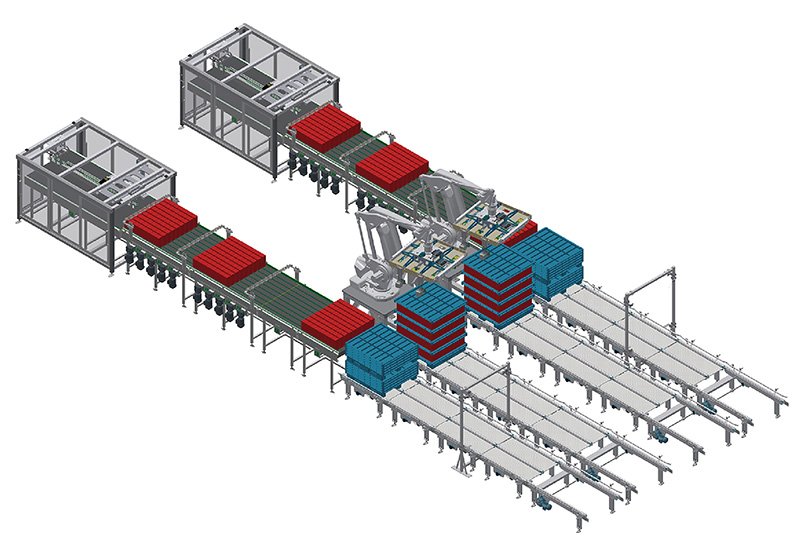
Հարմար է տուփերի, PET շշերի, ապակե շշերի, տարաների, պլաստիկե տակառների, երկաթե տակառների և այլնի ավտոմատ բեռնաթափման համար։
Արտադրանքի ցուցադրում


3D նկարչություն

Էլեկտրական կոնֆիգուրացիա
| Ռոբոտի ձեռքը | ABB/KUKA/FANUC |
| ԲԲԸ | Սիմենս |
| ՎՖԴ | Դանֆոս |
| Սերվոշարժիչ | Էլաու-Սիմենս |
| Ֆոտոէլեկտրական սենսոր | Հիվանդ |
| Պնևմատիկ բաղադրիչներ | ՍՄԿ |
| Սենսորային էկրան | Սիմենս |
| Ցածր լարման սարքավորումներ | Շնայդեր |
| Տերմինալ | Ֆինիքս |
| Շարժիչ | ԿԱՐԵԼ |
Տեխնիկական պարամետր
| Մոդել | LI-RBD400 |
| Արտադրության արագություն | 24000 շիշ/ժամ 48000 կափարիչ/ժամ 24000 շիշ/ժամ |
| Էլեկտրամատակարարում | 3 x 380 AC ±10%, 50HZ, 3PH+N+PE: |
Ավելի շատ տեսահաղորդումներ
- Ռոբոտ-պալետիզատոր շշերի համար՝ բաժանարար և միաձուլման գծով
- Ռոբոտ-պալետահան՝ բաժանարար և միաձուլման գծերով արկղերի համար